Project 6: Classifying Lidar data
- Due: by Saturday December 16th, 1pm ( this is the exam day/time for this class in Polaris)
- Group policy: Partner-optional
The goal of this project is to obtain a digital terrain model (DTM) from Lidar data by converting it to a grid, identifying the “bare ground” ie the points that represent the ground as opposed to noise, buildings and vegetation, removing the non-ground points (noise, buildings and vegetation), and interpolating the resulting “holes” in the ground into a full digital terrain model grid. While identifying the ground vs non-groud points you will be able to classify the non-ground objects as buildings or vegetation.
As usual, check in your code in the github repository and send me a report —- containing:
- images that showcare your results for the three dataset
- describe how you classify ground vs non-ground (and vegetation vs buildings if you do that)
- a list of all parameters that can be tuned and their values
- instructions on how to run your code.
- Reflection: How did this project work for you? which of the six projects this semester was your favorite?
Note that if your project is not fully working, your report should include all the details on your process, what you tried and where you got stuck — everything that shows your work process so that I can evaluate for partial credit.
Dataset france.las
./main data/france.txt
read total 101206 points
bounding box: x=[876734.00, 876834.00], y=[2260797.00,2260897.00], z=[348.28,362.93]
lidar_to_dsm:
n=101206, sqrt(n) =318, corresponding cell_x = 0.3, cell_y=0.314
starting with: nrows = 319, ncols =319, cellsize = 0.314
nb.last returns: 92755 (out of 101206 total points)
#points/cell #cells
0 37843
1 41018
2 18167
3 4006
4 535
5 93
6 34
7 20
8 16
9 9
10 8
11 3
12 6
13 1
14 1
15 1
total 92755
avg 0.91 (nb.points/cells)
avg 1.45 (nb.points/non-empty cells)
grid size accepted.
lidar_to_dsm: done
grid dsm (0x600000658000):
n=101761 [rows=319,cols=319], range=[348.28, 362.93], avg value=352.9 nodata=37843 (37.2%)
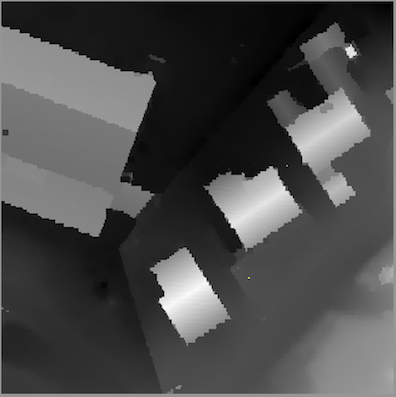
writing map.dsm-grayscale.bmp
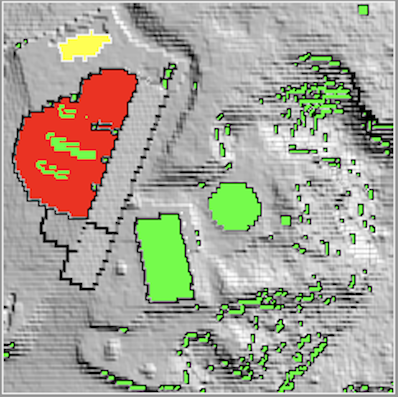
cc 1: source vertex (1,1)..done. 70436 points reached and marked as 1
cc_id= 1: size=70436, bbox=[1,317,1,317], bbox_fill=70.093246
cc 2: breakline source vertex (15,269)..done. 1877 points reached and marked as 2
cc_id= 2: size= 1877, bbox=[15,168,214,302], bbox_fill=13.694732
cc 3: breakline source vertex (17,250)..done. 42 points reached and marked as 3
cc_id= 3: size= 42, bbox=[17,37,231,250], bbox_fill=10.000000
cc 4: breakline source vertex (18,1)..done. 1652 points reached and marked as 4
cc_id= 4: size= 1652, bbox=[18,244,1,134], bbox_fill=5.430995
cc 5: source vertex (21,1)..done. 5454 points reached and marked as 5
cc_id= 5: size= 5454, bbox=[21,105,1,125], bbox_fill=51.331764
...[skipped]
cc size thresholds: T1=40mp(404.8 cells), T2=1000mp(10120.6 cells), with 1cell=0.10mp
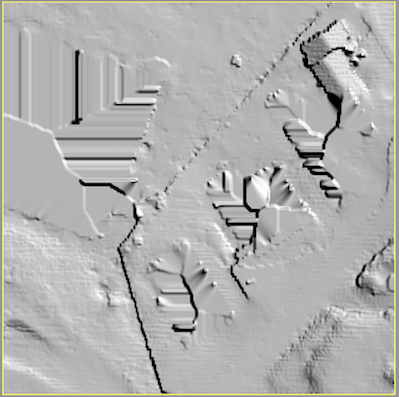
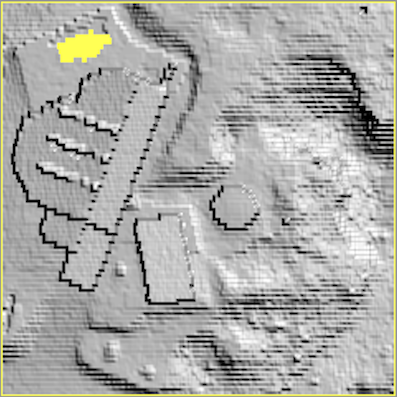
writing map.ground-hillshade.bmp
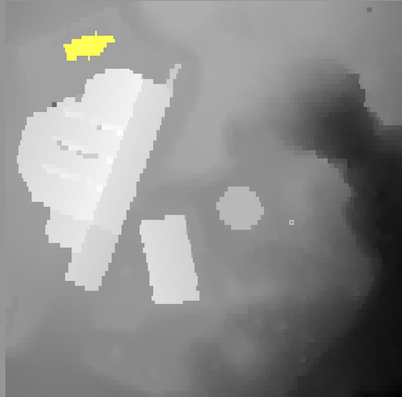
dilate nodata
dilate nodata
writing map.ground-hillshade.bmp
interpolate_dtm_grid:
added 3177 points to the queue
interpolate_dtm_grid done.
writing map.ground-interpolated.bmp
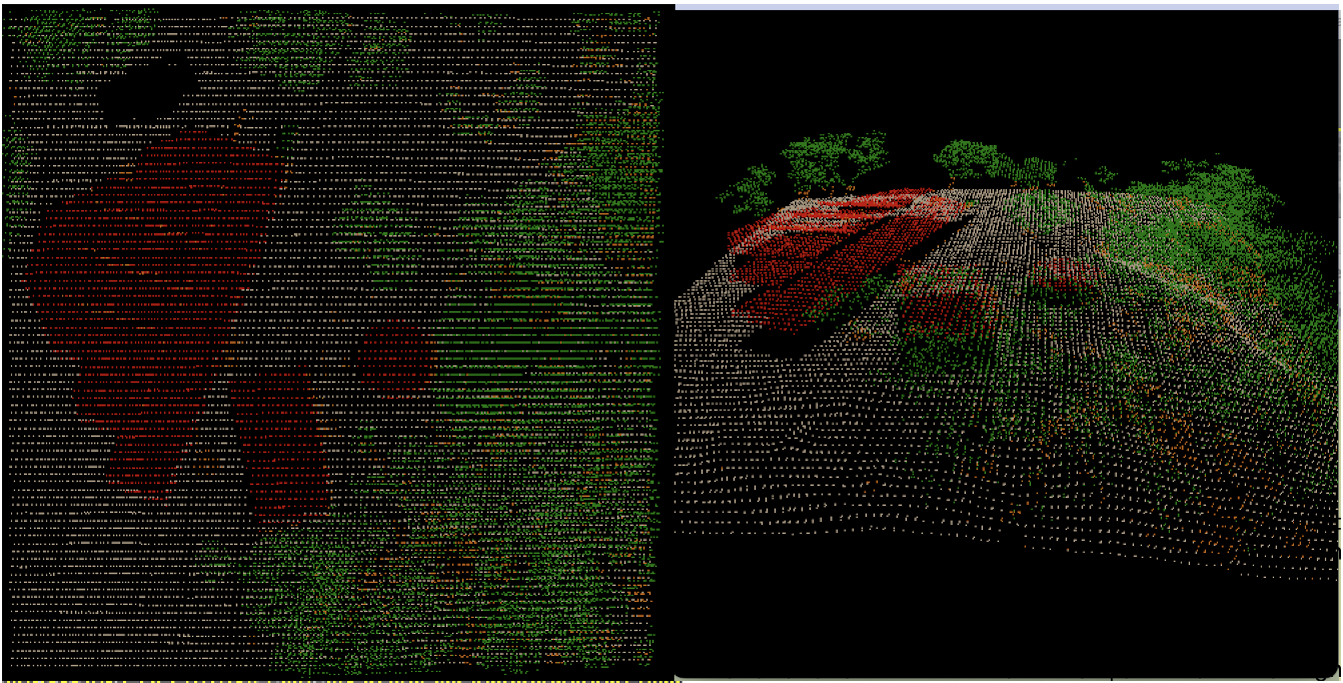
This dataset is not pre-classified.
Shown in 3D by lidarview:


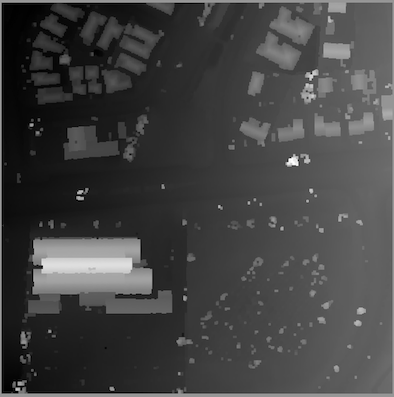
Created by my code:
Digital surface model, initial and after one erode:

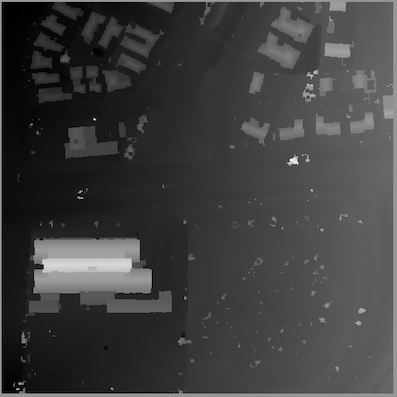
After one more erode:
And a dilate:

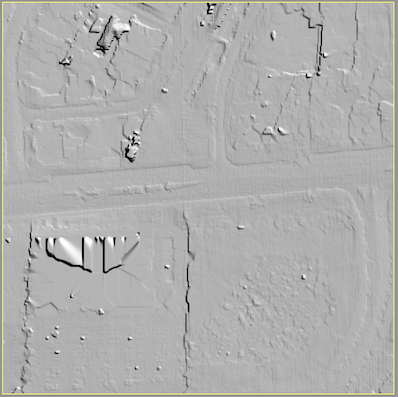
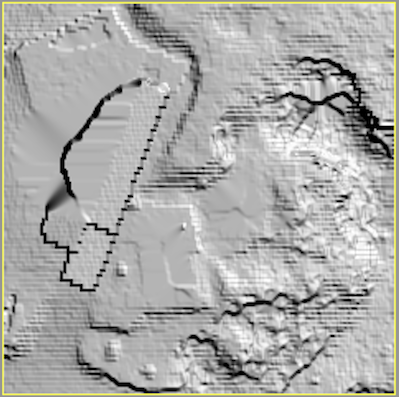
The hillshade:

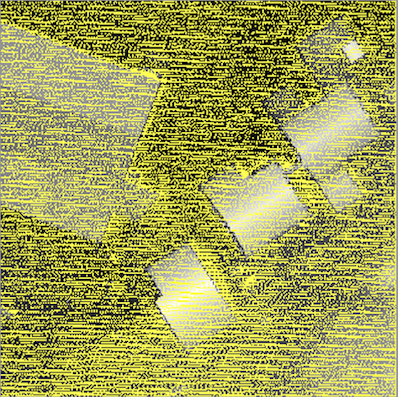
Slope:

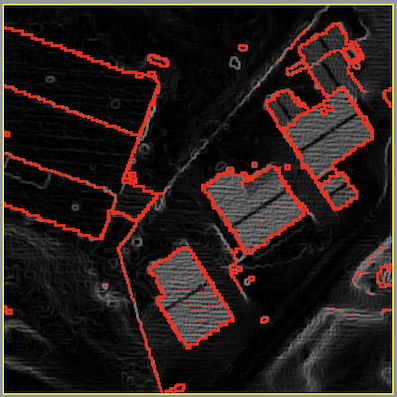
Breaklines (points in red are points with slope >= 45 deg):
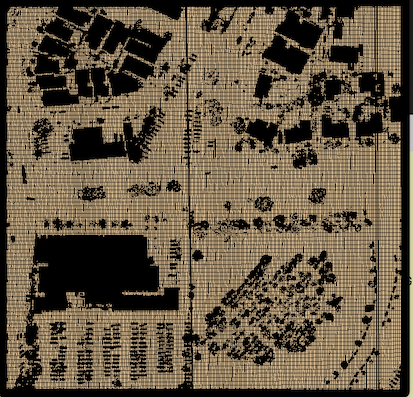
Connected components, each shown with a different color:

Attempt at classification (based on cc size and bbox fill):

And finally, the interpolated bare gound = digital terrain model:
Dataset house.las
(base) ltoma@XVR66RXWMT code % ./main data/house.txt
read total 57084 points
bounding box: x=[309227.00, 309269.00], y=[6143455.00,6143497.00], z=[451.40,471.39]
lidar_to_dsm:
n=57084, sqrt(n) =238, corresponding cell_x = 0.2, cell_y=0.176
starting with: nrows = 239, ncols =239, cellsize = 0.176
nb.last returns: 36605 (out of 57084 total points)
#points/cell #cells
0 43135
1 2312
2 2496
3 7650
4 1363
5 107
6 43
7 14
8 1
total 36605
avg 0.64 (nb.points/cells)
avg 2.62 (nb.points/non-empty cells)
grid size accepted.
lidar_to_dsm: done
grid dsm (0x6000018e4000):
n=57121 [rows=239,cols=239], range=[451.40, 471.14], avg value=459.1 nodata=43135 (75.5%)
writing map.dsm-grayscale.bmp
lidar_to_bareground:
erode
erode
dilate
writing map.dtm1.hillshade.bmp
generate_slope:
grid slope_grid: (0x6000018e9350):
n=57121 [rows=239,cols=239], range=[0.00, 1.52], avg value=0.3 nodata=1356 (2.4%)
writing map.slope-on-hillshade.bmp
cc 1: source vertex (1,1)..done. 43250 points reached and marked as 1
cc_id= 1: size=43250, bbox=[1,237,1,237], bbox_fill=76.999763
cc 2: breakline source vertex (3,217)..done. 24 points reached and marked as 2
cc_id= 2: size= 24, bbox=[3,7,217,221], bbox_fill=96.000000
cc 3: source vertex (5,219)..done. 1 points reached and marked as 3
cc_id= 3: size= 1, bbox=[5,5,219,219], bbox_fill=100.000000
cc 4: breakline source vertex (24,14)..done. 1 points reached and marked as 4
cc_id= 4: size= 1, bbox=[24,24,14,14], bbox_fill=100.000000
cc 5: breakline source vertex (26,10)..done. 3 points reached and marked as 5
cc_id= 5: size= 3, bbox=[26,27,9,10], bbox_fill=75.000000
[...]skipped
writing map.ground-hillshade.bmp
dilate nodata
dilate nodata
writing map.ground-hillshade.bmp
interpolate_dtm_grid:
added 3177 points to the queue
interpolate_dtm_grid done.
writing map.ground-interpolated.bmp
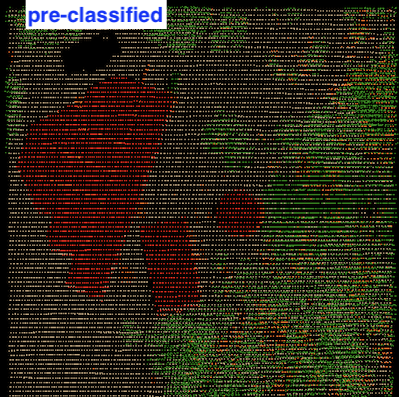
Pre-classified, as shown by lidarview
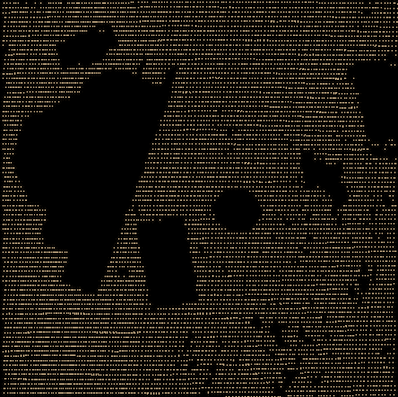
Ground only:
Created by my code:
Digital surface model, initial and after one erode: 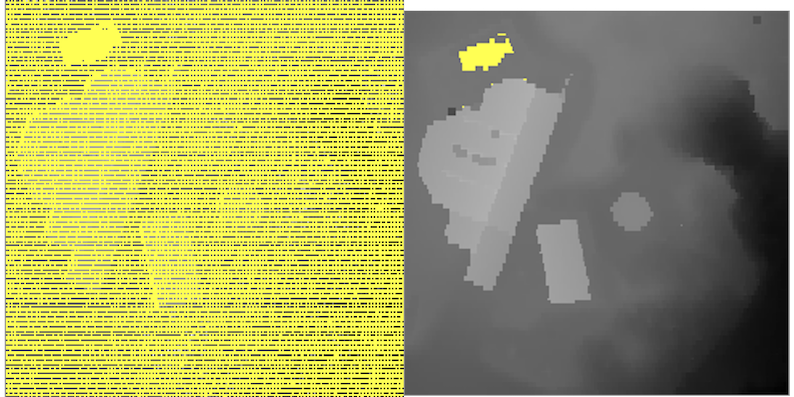
After one more erode:

And a dilate:
The hillshade:
Slope:

Breaklines (points in red are points with slope >= 45 deg):

Connected components, each shown with a different color:

Attempt at classification (based on cc size and bbox fill):
And finally, the interpolated bare gound = digital terrain model:
Dataset fusa.las
(base) ltoma@XVR66RXWMT code % ./main data/fusa.txt
read total 277573 points
bounding box: x=[277750.00, 278000.00], y=[6122250.00,6122500.00], z=[42.21,64.35]
lidar_to_dsm:
n=277573, sqrt(n) =526, corresponding cell_x = 0.5, cell_y=0.475
starting with: nrows = 527, ncols =527, cellsize = 0.475
nb.last returns: 263370 (out of 277573 total points)
#points/cell #cells
0 97010
1 101976
2 75415
3 2781
4 516
5 29
6 2
total 263370
avg 0.95 (nb.points/cells)
avg 1.46 (nb.points/non-empty cells)
grid size accepted.
lidar_to_dsm: done
grid dsm (0x60000315d200):
n=277729 [rows=527,cols=527], range=[42.21, 64.30], avg value=47.9 nodata=97010 (34.9%)
writing map.dsm-grayscale.bmp
lidar_to_bareground:
erode
erode
dilate
writing map.dtm1.hillshade.bmp
generate_slope:
grid slope_grid: (0x600003154060):
n=277729 [rows=527,cols=527], range=[0.00, 1.51], avg value=0.2 nodata=2104 (0.8%)
writing map.slope-on-hillshade.bmp
cc 1: source vertex (1,1)..done. 1 points reached and marked as 1
cc_id= 1: size= 1, bbox=[1,1,1,1], bbox_fill=100.000000
cc 2: breakline source vertex (1,2)..done. 7 points reached and marked as 2
cc_id= 2: size= 7, bbox=[1,4,1,3], bbox_fill=58.333332
cc 3: source vertex (1,4)..done. 218307 points reached and marked as 3
cc_id= 3: size=218307, bbox=[1,525,1,525], bbox_fill=79.204353
cc 4: breakline source vertex (1,69)..done. 223 points reached and marked as 4
cc_id= 4: size= 223, bbox=[1,26,65,112], bbox_fill=17.868591
cc 5: source vertex (1,71)..done. 543 points reached and marked as 5
cc_id= 5: size= 543, bbox=[1,24,67,110], bbox_fill=51.420456
cc 6: breakline source vertex (1,194)..done. 140 points reached and marked as 6
cc_id= 6: size= 140, bbox=[1,17,194,233], bbox_fill=20.588236
[...]skipped
writing map.ground-hillshade.bmp
dilate nodata
dilate nodata
writing map.ground-hillshade.bmp
interpolate_dtm_grid:
added 11353 points to the queue
interpolate_dtm_grid done.
writing map.ground-interpolated.bmp
Pre-classified, as shown by lidarview

ground only:
buildings and vegetation:

Created by my code:
Digital surface model (dsm):

Eroded:

Eroded again:
Dilated:
Hilllshade:

Slope:

Breaklines: Points shown in red are points with slope >= 45 deg:

Connected components, each shown with a different color:

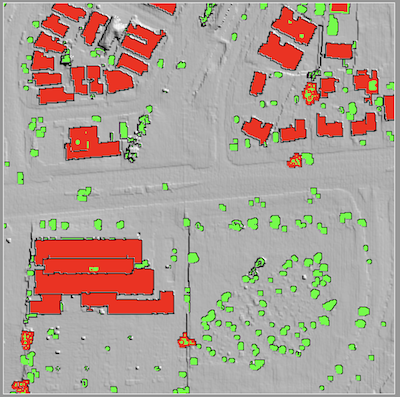
Attempt at classification (based on cc size and bbox fill):
And finally, the interpolated bare gound = digital terrain model: